|
|
|
Activité scoot'elec |

1-Étude de la chaîne d'énergie du scoot'elec
Pour les questions suivantes, donner le nom et si possible la valeur numérique de la grandeur demandée
a-Donner les caractéristiques des batteries du scoot'elec
b-Donner le type de modulateur d'énergie
c-Donner le type de moteur
d-Quelle conversion effectue ce moteur
e-Donner le rapport de réduction de l'ensemble poulie motrice 9, courroie 10 et poulie réceptrice 7.
f- Donner le rapport de réduction de l'ensemble arbre primaire 4 et roue de sortie 6.
g-Donner le rapport entre la la vitesse du scooter (m/s) et la vitesse de rotation de la roue arrière du scooter (tr/min).
h-Compléter le synoptique suivant en partant des batteries et en finissant par la vitesse du scooter.
2-Étude de la régulation de vitesse
a-Ouvrir le fichier suivant : Scooter.psimsch
b-Replacer le nom de chaque élément à côté de son symbole.
c-Faire un double clic sur l ’élément poulies-courroie et remplir la ligne gear ratio avec la valeur calculée dans la question 1-e
d-Faire de même avec l'élément roues dentées avec la valeur trouvée dans la question 1-f..
Appeler le professeur
e-Réaliser un synoptique de la boucle de régulation de vitesse du scoot'elec
f-Lancer une simulation ( Aller voir comment ici) et en mesurant la vitesse maximale du scooter, dire si on est en France ou en Suisse.
g-Quel élément faut-il modifier pour respecter la réglementation de l'autre pays concernant la vitesse maximale ?
h-Modifier cet élément et lancer une simulation pour vérifier votre réponse.
3-Étude du régulateur
a-Donner le type et la valeur du correcteur.
b-Lancer 3 simulation pour des valeurs de 3, 10 et 50. Dire ce qu'il se passe quand on augmente la valeur de ce correcteur.
c-Avec ce type de correcteur atteint-on exactement la valeur désirée ?
-si oui, donner les temps de réponse à 5% pour les 3 cas précédents.
-si non, donner l'erreur statique pour les 3 cas précédents.
d-Modifier le correcteur K pour un correcteur PI :

e-Faire un double clic sur l ’élément PI et remplir la ligne gain avec 3 et la ligne time constant avec 1
f-Lancer une simulation et conclure sur l'effet du nouveau correcteur (stabilité, rapidité tr5% et précision).
g-Vérifier les performances du scooter (accélération pour 100m et 10m)
4-Effets d'une perturbation
On va voir l'effet d'une côte sur les performances du scooter.
On va rajouter la perturbation dans la simulation :
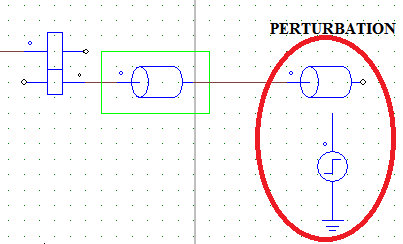
a-Choisir une charge mécanique contrôlée dans la barre d'outil Éléments ==> Power ==> Mecanical loads and sensors ==> Mecanical load (ext. controlled) et la placer à droite de la charge
b-Choisir la fonction Step :

Faire un double clic sur l ’élément Step et remplir la ligne Vstep avec 100 et Tstep avec 30, ensuite la placer sous la charge contrôlée.
c-Placer la masse sous l'élément Step.
d-Lancer une simulation et conclure sur l'effet de la perturbation (stabilité, rapidité tr5% et précision).
e-Quelle est la tension moteur avant la montée ? Donner le rapport cyclique du hacheur
f-Quelle est la tension moteur après ? Donner le rapport cyclique du hacheur
Créé avec HelpNDoc Personal Edition: Mettez à niveau votre processus de documentation avec un outil de création d'aide